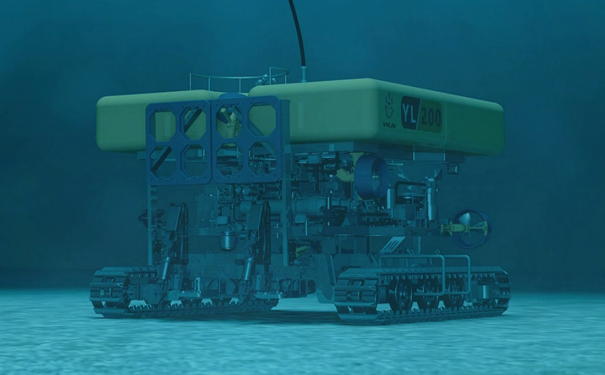
ros水下机器人仿真监控平台能够实时控制水下机器人各个方向的运动,可以实时采集和显示水下机器人所携带的加速度计、陀螺仪、深度计等传感器的数据,还可以利用水下摄像头反馈当前工作的水下环境等。同时,解决设备通信不协调和代码复用等通用性较低的问题。

ros水下机器人仿真监控平台由硬件平台和软件平台2部分组成。
1. 硬件平台
ros水下机器人仿真监控平台的硬件平台包括水面上的操作员控制器和水下的水下机器人本体。水面部分的操作员控制器主要由操作员控制台和供电装置组成,操作员控制台负责控制水下机器人的运动以及接收水下机器人的传感器数据,供电装置负责给操作员控制台和水下机器人主体供电。水下机器人控制器包括主控制器、推进器模块、传感接口模块、图像采集与传输模块。
利用微型工控机作为遥控水下机器人的主控制器,通过四芯网线利用TCP/IP协议接收岸上操作员控制器下达的控制指令,并对舱内各个设备进行任务分配。电源监测管理模块负责将电池组输出的电源分级处理后提供给各个部件,同时电源监测数据使用232串口方式提供给主控制器。推进器驱动模块由6个推进器驱动模块组成,它们分别对应6个推进器电机。推进器模块通过485串口方式从主控制器接收驱动命令,驱动电机正反转,控制电机的转速,控制水下机器人的上浮、下潜、前进、后退、转向等运动。传感器接口模块集成了包括陀螺仪、加速度计、深度计、温湿度传感器等多种传感器,该模块负责采集多种传感器数据,预处理采集的数据并发送给主控制器。传感器接口模块与主控制器之间采用232串口方式进行通信。图像采集与传输模块主要由图传设备和摄像头组成,摄像头拍摄到的画面通过VGA接口传输给图传设备,再由图传设备显示在操作员控制器的屏幕上。

2. 软件平台
ros水下机器人仿真监控平台的软件平台以水下机器人监控系统硬件体系结构为基础,从下而上分为感知执行层、导航控制层和监视操作层3个层次。
2.1 感知执行层
感知执行层能够感知水下机器人所处环境,测算水下机器人在水中运动时的姿态并且能够执行操作员发出的控制命令。它主要由信号采集处理模块和电机驱动控制模块构成。信号采集处理模块主要是采集各种传感器的信息,并进行一定程度的预处理;电机驱动控制模块根据上层规划任务生成的指令来对每个推进器进行转速和转向的控制,最终实现机器人的运动控制。
2.2 导航控制层
导航控制层是水下机器人能够具备自主能力的关键,由运行在主控制器上的ROS以及若干节点构成。其中运动控制节点是根据操作员命令、姿态控制节点或者自主导航节点的要求,控制水下机器人涡轮推进器工作的软件模块。
人机交互节点是连接操作员控制器和主控制器的桥梁,负责两端的数据传输。姿态控制节点具有两个作用,一是接收来自环境感知节点收集并处理好的数据,并根据这些数据建立数学模型,确定机器人的航行姿态;二是利用解得的姿态,规划出对应的控制方案,并让机器人在无人状态下也能保持航姿的基本平稳。
环境感知节点负责接收并处理加速度计、陀螺仪、温湿度传感器、深度计等传感器的数据。抓取控制节点负责控制机器人的机械臂动。
照明控制节点负责控制机器人的开关。自主导航节点负责根据操作员的需要,按照一定的规划自动控制水下机器人的导航行进。当前的环境触发不同行为,多种行为经过行为融合仲裁模块决策后,依靠设定的优先级选择出需要的反应动作。这种反应动作是在当前层中执行,不需要向上层传输和等待任务规划的过程,因此可以加快系统的响应速度。导航控制层的核心是ROS,它的实质是一个通信中间件,能够提供订阅发布的通信机制。
2.3 监视操作层
监视操作层处于系统的顶层,负责确定任务的目标,把握机器人的工作方向,还负责监测整个系统的运行状态,为操作人员的实时决策提供支持。监视操作层的主体是操作员控制器的远程操作界面,负责让操作人员实时监测和控制水下机器人。

ros水下机器人仿真监控平台让操作人员通过人机界面与水下机器人进行交互,实现控制机器人和监测水下环境的目标。通过ROS的使用提高了水下机器人监控系统的灵活性和适应性,统一了机器人内部各个模块的集成和使用,大大减少了系统开发过程中的重复性工作。同时,采用这种架构提高了功能拓展方面的便利性,为将来更深入的研究,如水下定位导航、水下目标识别跟踪、水下地图建立等功能的开发提供了基础条件。
推荐案例:灵图互动ROV水下作业仿真平台