工业机械臂虚拟仿真课程很大程度上不再受时间和空间上的限制,采用工业机械臂虚拟仿真和线下课程相结合的教学方式,充分利用虚拟仿真的灵活性和实际工业机械臂的可验证性,最大化地利用教学资源,使学生以更加灵活自主的方式接受和实践机器人专业课程的实训教学。不仅可以避免实体实验教学的短板,还可以可以作为工业机械臂虚拟仿真类实验教学的一个重要支撑。
新工科背景下工业机械臂虚拟仿真实验课建设具有如下优势:
(1)扩展性。通过工业机械臂虚拟仿真与实际设备无缝对接,线上建模,可以在摆脱线下设备台套数限制的同时,完整复现线下设备功能,实现对线下设备的功能性扩展;
(2)低成本。一次性投入,可无限复制,单套产品成本低。
(3)应用范围不受限制。不受场地硬件的限制。
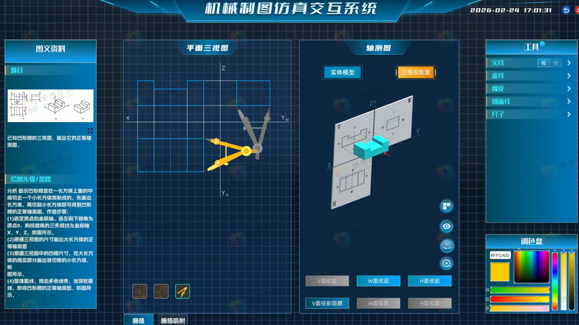
(4)丰富的表现形式。图像,动画,控制逻辑等于一体,表现力更直观。和传统线下设备不同,工业机械臂虚拟仿真实验可以360度全方位全视角观察模型、做实验,对于一些平时难以观测到的封装好的设备部件,在工业机械臂虚拟仿真实验中均可清晰地表现出来。
(5)人性化的实验训练。使用者进行虚拟操作训练时,不用担心设备损坏,如果操作不合规范,或者实验失败,系统还可以辅助提示。
(6)更易修改和扩充。当装备进行修改或升级时,软件系统也能方便地进行更新,升级成本远低于实物教学装备的升级。
(7)实体设备数字化。从设计开始,也可以在设备进行运行的时候使用各种类型的传感器来收集运行状态来对它的工况、位置等进行接近实时的采集和分析。
工业机械臂虚拟仿真实验课教学系统主要涵盖四个部分:基础学习部分、练习和操作部分、作业和考核部分。
1. 基础学习部分
通过对工业机械臂的理论知识、规划过程和设计过程以及工业机械臂工作场所的教学案例,使学生可以对工业机械臂技术的基本理论、工作方法有清晰的认识,了解技能和计划流程。同时,为学生演示整个工业机械臂的原理、操作、运维流程,使学生学习了解完整的工业机械臂虚拟仿真,为老师的实验教学提供展示范例。

2. 练习和操作部分
通过工业机械臂虚拟仿真系统进行仿真模拟操作,工业机械臂虚拟仿真模拟的步骤包括四步:场景搭建、轨迹设计、仿真、后置,各步骤之间层层递进、紧密联系,让学生能够熟练地掌握工业机械臂工作站搭建和分析解决轨迹规划、优化。
在完成轨迹规划设计之后,通过后置生成对应的程序代码,将所生产成的程序代码移植到真实机械臂中进行验证分析,熟练操作工业机械臂工作站搭建并能尽可能地解决实际轨迹规划出现的各种奇异问题。如果在操作工业机械臂工作站搭建和解决轨迹规划故障时,存在不能熟练操作和解决的轨迹规划故障,反过来再通过教学引导进行理论讲解,接着让学生进行工业机械臂虚拟仿真模拟,最后再进行实际操作解决轨迹规划故障。

3. 作业和考核部分
学生在进行实际操作时,除了查看操作的结果和现场的数据外,学生还可以通过工业机械臂虚拟仿真软件提交作业。教师可以登录,随时随地访问软件系统,并审查学生提交的作业,提出适当的意见和建议。
同时,学生可以随时随地登录系统以查看教师的评论,根据评论查找问题,然后使用虚拟仿真软件解决问题,重复此步骤以提高学生发现、诊断和解决问题的能力。

在教学过程中,建立工业机械臂虚拟仿真课程资源库,使用工业机械臂虚拟仿真的教程视频、机械臂的设计技巧、机械臂虚拟仿真方法等;其次,通过实践操作,讨论问题,收集反馈意见,修改调整策略,实现动态教学;再次,工业机械臂虚拟仿真的考核采取过程性考核,每一次仿真实践都是一次考核,课程总成绩就是过程性考核的平均成绩,具体形式可以采用多种组合,包括工业机械臂虚拟仿真结果、工业机械臂设计结果、研究报告、现场仿真结果、实践报告、在线教学过程记录等。学生的综合评价,也是过程性评价的综合,是各因素的综合评估。