随着现代场站对巡检需求的不断扩大,巡检机器人正从单一作业工具升级为智能运维体系的核心节点。灵图互动依托数字孪生技术,开发了机器人智能调度指挥数字孪生系统,融合物联网、大数据、虚拟现实等前沿技术,打造出覆盖“感知-决策-执行-优化”的全链条的智能巡检解决方案,为能源、制造、交通等领域提供现代化巡检智慧方案。

1. 数字孪生基础架构
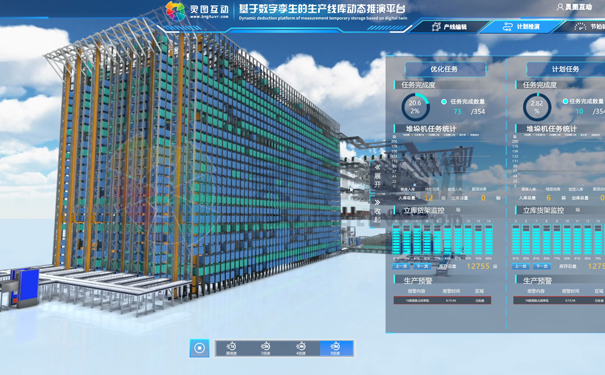
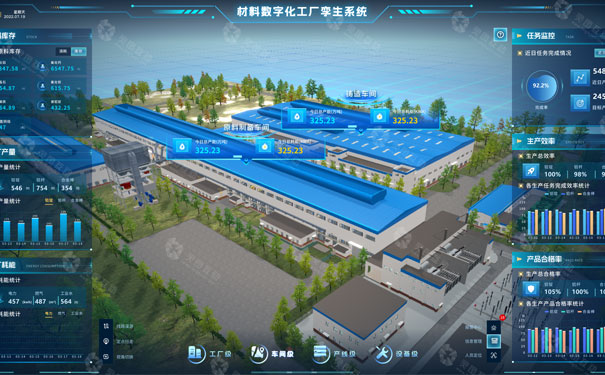
机器人智能调度指挥数字孪生系统通过三维激光扫描与BIM建模技术,1:1还原物理场站空间结构,构建出高精度数字孪生场景。系统不仅实现坐标系与物理场景的毫米级对齐,更通过动态材质渲染与物理引擎模拟,使虚拟环境具备真实的光照反射、设备碰撞等物理特性。在此之上,系统可快速集成各类传感器的实时数据流,将温度、湿度、气体浓度等环境参数以热力图、等高线等形式可视化呈现,形成与物理世界完全同步的数字镜像。
2. 智能调度多机协同
基于自主研发的调度算法引擎,系统突破传统单机控制模式,实现多机器人协同作业的智能调度。通过接入机器人管控平台的实时状态数据,系统可动态生成最优巡检路径。
在三维场景中,每个机器人的空间位置、任务进度、电池电量等关键指标通过漂浮窗实时展示;当多机路径产生交叉时,系统自动触发避让策略并更新调度指令,也允许操作员通过虚拟摇杆进行手动干预,确保复杂场景下的灵活应对。

3. 主动预警决策体系
机器人智能调度指挥数字孪生系统构建了多层级预警机制,将设备状态监测提升到新维度。在报警中心,采用动态仪表盘与趋势分析图相结合的方式,对电机过载、电池异常、传感器失效等多种故障进行分类统计。当监测数据触发阈值时,系统不仅通过声光报警提醒值班人员,更基于历史运维数据构建的预测模型,提前72小时预判设备维护需求。
4. 全维监控体系
机器人智能调度指挥数字孪生系统采用“二维面板+三维场景”的立体监控模式。在二维监控面板,采用模块化设计将机器人状态分解为位置轨迹、配件健康度、任务进度等专项模块,每个模块均可展开查看详细参数。三维场景中,机器人模型与物理实体保持同步运动,其上方悬浮窗实时显示当前作业动作、视频流状态等动态信息。
5. 数据驱动决策支持
系统内置的报表管理中心提供可视化配置界面,用户可根据需求自定义巡检频次、异常统计、环境参数等维度的数据看板。通过集成机器学习算法,系统能自动识别巡检数据中的异常模式,生成包含设备劣化趋势、故障关联分析的智能报告。这些数据资产不仅服务于当日运维决策,更通过持续积累形成企业专属的知识图谱,为设备全生命周期管理提供数据支撑。

机器人智能调度指挥数字孪生系统通过虚实融合的技术重构,正在重新定义工业巡检的智能化边界。该方案实现了从单一设备监控到全场景协同的跨越,通过数据驱动的预测性维护,将传统被动响应式巡检升级为主动预防式运维。作为智慧运维体系的核心组件,该系统正助力能源、制造等领域构建安全、高效、可持续的数字化现代巡检体系。
推荐案例:灵图互动巡检机器人智能调度数字孪生系统