伴随工业智能化进程的深入推进,巡检机器人智能调度与指挥数字孪生系统以技术融合与架构创新为支撑,构建了一套集成数据感知、场景仿真与决策管理于一体的综合管控平台。机器人智能调度指挥数字孪生系统深度融合虚拟现实(VR)、数字孪生及物联网技术,依托标准化数据接口与模块化系统设计,实现对多场景巡检机器人的统一监控与智能调度,为工业场站提供高效、安全且具备高度可视化的数字化运营解决方案。

1. 多维度数据集成与场景复现
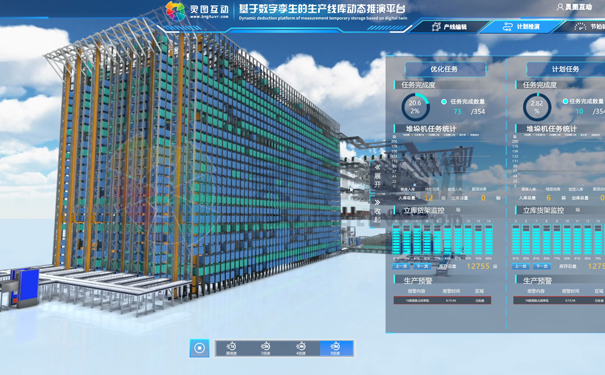
机器人智能调度指挥数字孪生系统以“数据标准化、监控一体化”为基本原则,有效解决传统运维模式中存在的信息隔离问题。平台通过统一通信协议接入各类场站机器人实时数据,涵盖设备运行状态、环境监测指标及视频图像等多类信息,并运用数字孪生技术构建高保真虚拟场景。
系统集成GIS空间数据,实现物理设备与虚拟监控点的精确映射。用户可通过三维可视化界面迅速定位目标设备、获取实时运行参数。借助空间关联分析,显著提升信息整合与异常识别的效率,辅助管理人员快速响应现场状况。
2. 可扩展的技术架构支撑
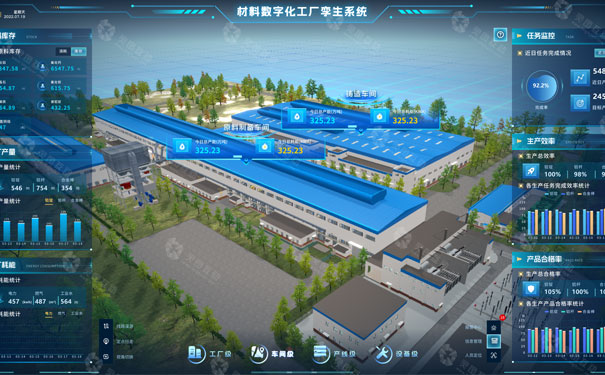
平台采用分层技术架构:底层依托物联网网关实现多源异构数据的采集与协议转换;中间层通过数字孪生引擎进行三维建模与动态渲染;顶层融入智能算法模型,提供分析与决策支持。虚拟现实技术的引入增强了交互体验,而模块化设计则为系统功能的持续拓展提供支持。
系统具备标准化API接口,兼容新设备接入、算法更新及第三方平台对接,确保其能够持续适应工业智能化的演进需求。该架构在保障系统先进性的同时,也为未来技术迭代奠定了坚实基础。

3. 可持续运营的管理价值
机器人智能调度指挥数字孪生系统通过数字化重构巡检管理流程,体现出三大核心价值:
远程监控能力:打破地理限制,实现设备状态的远程实时感知,有效规避现场作业风险;
通信可靠性:优化的数据传输机制在稳定网络环境下保持低延时更新,保障监控的准实时性;
接口标准化:标准化设计支持未来新型传感器与分析模型的无缝接入,延长系统技术生命周期。

机器人智能调度指挥数字孪生系统的研发与应用,使机器人巡检调度管理正式迈入数字化孪生时代。数字孪生平台解决了传统巡检模式中信息分散、响应滞后的问题,并以可扩展的架构设计为工业智能化转型提供了弹性支撑。未来,随着人工智能算法的深度集成,平台将在预测性维护、自主决策等领域进行更多探索,持续推动工业管理模式的创新升级。
推荐案例:灵图互动巡检机器人智能调度数字孪生系统