工业机器人三维仿真系统在机器人技术研究领域和应用领域发挥着不可替代的作用。随着虚拟现实技术和工业机器人离线编程技术的发展,机器人仿真系统是重要的研究工具,同时,还为机器人设计和研究提供方便。工业机器人三维仿真涉及到机器人机构学、机器人运动学、机器人零件建模、仿真机器人三维实现和机器人运动控制等方面内容,可以帮助研究人员了解机器人的工作空间形态和极限,获得合理的运动方案和有效的运动控制算法,从而提前发现并解决机器人在设计、制造及运行过程中的问题。不仅可以节省采购制作实体机器人的费用,而且避免了因直接操作实体机器人可能存在的安全隐患。

1. 将三维仿真技术运用于工业机器人的优势
1.1 将一些数据过程真实地展现出来
通过工业机器人三维仿真系统的三维建模功能、运动学和动力学仿真功能、控制系统仿真功能,用各软件最强大的功能模块,将特殊结构、特殊荷载的复杂设计化繁为简,并更加真实地展现出来,数据修改过程也变得方便。
1.2 有效地节省加工成本
通过利用三维仿真技术,工业机器人三维仿真系统大大提高设计效率,节约设计、实验和加工成本,缩短研发周期,甚至可将长达几年的研发缩短至几个月。三维仿真分析数据还可以运用于实际操作过程中,往往能够将需经过多次实践方可调整好的情况一步到位。

2. 工业机器人三维仿真系统实现步骤
工业机器人三维仿真系统实现步骤如下:
2.1 工业机器人运动学分析
工业机器人三维仿真系统首次对工业机器人活动进行分析,机器人运动学描述了机器人上每一个活动连杆相对于坐标系的位置和姿态的关系。机器人运动学分为正运动学和逆运动学。正运动学是已知机器人各个轴的运动参数,求取机器人末端执行器在空间中的位姿。运动学的逆解是已知机器人末端执行器的位姿,求解各关节的变量。
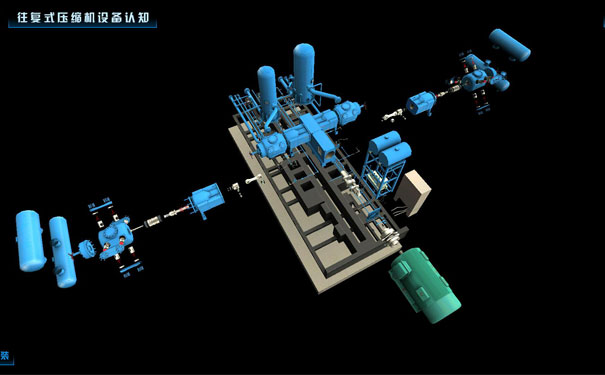
2.2 工业机器人三维仿真模型建立
为了得到逼真的仿真效果,工业机器人三维仿真系统需要来编辑生成机器人的三维模型。根据工业机器人的结构,将其分解成包括底座在内的不同部分。在软
件中分别对每个部件进行坐标系的标定,并导出文件。根据参数在特定工作环境中的对应,最终得到工业机器人总装配图。
2.3 工业机器人三维仿真系统体系构建
机器人三维模型建立完成之后,即可进行编程,实现对机器人运动进行精准的控制。为了使三维仿真系统能够真正地模拟工业机器人系统的操作和控制过程,须采用合理的软件体系结构,保证系统的可靠性和仿真的真实性。
2.4 工业机器人三维仿真系统功能扩展
在工业机器人三维仿真的基础上扩展其功能,实现机器人的轨迹规划和虚拟示教再现等功能。虚拟示教是基于工业机器人三维仿真系统,是规划工业机器人运动轨迹的一种有效方法。通过记录手动控制的虚拟工业机器人在仿真系统中的一系列离散的空间点,示教机器人的整个运动轨迹。

3. 工业机器人三维仿真系统功能模块
3.1 图形建模模块
工业机器人三维仿真系统的图形建模模块,是通过在建模软件中采用相对坐标系分开建立机器人各零件模型确定出每个零件与上下零件连接的关节点。以上关节为坐标原点建立零件输出图形数据文件。上零件姿态变化下零件位置信息不须做任何变化自动在新的关节位置上建构每个零件的信息独立。
3.2 图形接口模块
工业机器人三维仿真系统的图形接口模块,通过工业机器人三维仿真软件读入图形数据文件识别文件格式,建立起各零件数据信息。包括零件上组成三角面片的每个点的坐标、颜色、方向矢量以及点的组合信息。
3.3 图形绘制模块
工业机器人三维仿真系统的图形绘制模块根据各零件信息指绘制零件,添加颜色、光照根据零件空间位置、角度等信息组合零件显示机器人整体。
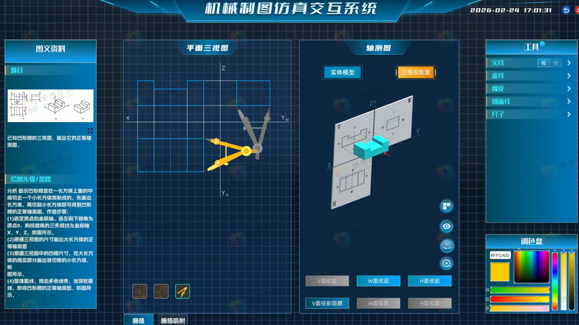
3.4 图视图模块
工业机器人三维仿真系统的图视图模块将机器人在四个不同视角的视窗中定位、显示实现远近、移动、旋转、灯光、网格背景等视图辅助功能。
3.5 控制模块
制作模拟机器人运动的控制面板及各零件信息随控制命令的更改执行用户对机器人的控制操作。
3.6 运动学原理模块
工业机器人三维仿真系统根据运动学原理,以机器人运动学正解、反解算法为原理编写各关节量与末端执行器位姿之间的数学关系。
3.7 工作文件模块
工业机器人三维仿真系统的工作文件模块,通过规定工作文件数据结构格式实现工作文件的读写、保存等功能。工作文件可以发送到下位机连接端口对真正的机器人进行操作。